RAIN{Indie} Behaviour Tree Custom Action
By Ellery Prisk | 27 October 2013
This has been sitting at 90% done for a while now. Rival Theory is making some changes so I thought I’d better hurry up with this before it becomes irrelevant. Like I mentioned in the last post, I had to use RAIN{Indie} this year in a group project at university, and that involved making custom actions. Building off of the last tutorial, we now want the AI to patrol, and when they detect something, move towards it. Here’s how I did it.
Setting up waypoints
First we need some waypoints to get the AI to patrol between them. Then we’ll spruce it up with custom actions.
Create a waypoint collection for the sphere
Select the Sphere’s Path Manager.
- Choose Create a New Waypoint Collection. This will generate a new waypoint collection called Waypoints 1.
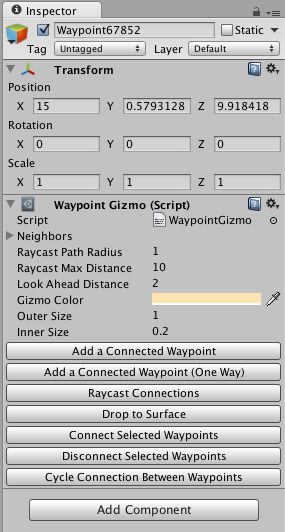
- Select Add a Waypoint. This generates a randomly named waypoint, in my case (Waypoint64585), under the Waypoints 1 collection.
Find the generated waypoint in Waypoints 1 in the hierarchy. Select Add a Connected Waypoint. This will generate another waypoint in the same waypoints collection. If you drag the waypoints apart you’ll see that they are connected.
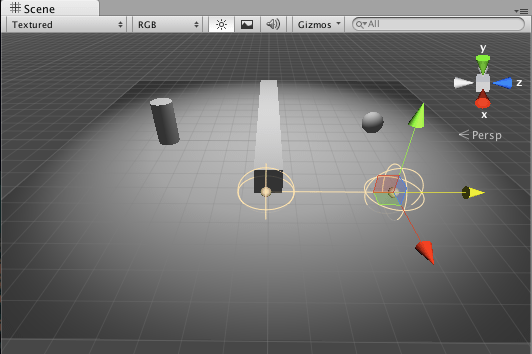
So you now have two connected waypoints in the Waypoints 1 collection. Position these waypoints to where you want the AI to patrol. For this example, set one waypoint to pos(5, 0, 15) and the other to pos(15, 0, 15). Now to get the sphere to follow the waypoints.
##Setup the behaviour tree
We want the Sphere to patrol between waypoints and keep an eye out for the cylinder at the same time. If the Cylinder is detected, the Sphere should stop patrolling, switch to the navgrid (to avoid obstacles), and move towards the cylinder.
Breaking this behaviour into a behaviour tree, we need a patrol node which has nodes for detecting and moving. We need a node for moving towards a cylinder. Finally, we need a variable for changing between patrolling and chasing.
What type of nodes are needed?
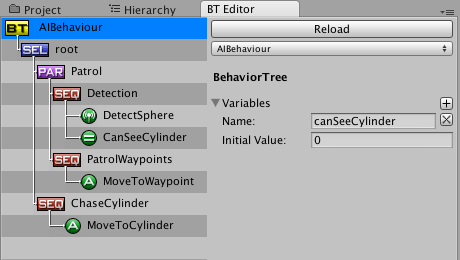
Off the root node, there is a choice between patrolling and chasing. We only want to do one or the other. A select node will select the first node that returns success and will only fail if all child nodes fail. With the root as a selector we can place the patrol node first. If patrolling succeeds, the root selector node will only choose patrolling. If it fails, the root selector node will move on to the next node which will be chasing/moving towards the cylinder.
Patrolling has two parts, detecting and moving. These both need to be run at the same time, which we use a parallel node for.
The detecting node also has two parts, one detect action and an assign action. The detect action is the same as the previous tutorial where the Sphere’s Sensor is used to detect the Cylinder’s Aspect. The assign action is used to change the variable for chasing and patrolling. We want these nodes to be run in order (so we only change from patrolling if we’ve detected something), which is what the sequencer node does.
Both the moving between waypoints and chasing the cylinder are custom actions which I’ll go over next. Since we don’t need a special node here, we’ll just use a sequencer to call the custom action.
Behaviour tree variable and preconditions
To switch between patrolling and chasing, we need to declare a variable. You can do this in the BT Editor by selecting the BT node and adding a variable to the list. For this example, I called the variable canSeeCylinder and set it to 0. 0 means nothing has been detected, 1 means something has been detected.
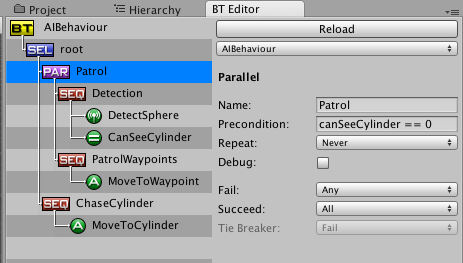
In the patrol node, set the precondition to canSeeCylinder == 0. This means the patrol node will only execute if canSeeCylinder is 0. For the assign action which I’ve called CanSeeCylinder, you want to set the canSeeVariable to 1. That is, set the Expression to canSeeCylinder = 1. Once the assign node is executed, it will change the value of the canSeeCylinder variable. Finally, add a precondition to the ChaseCylinder node. Precondition canSeeCylinder == 1.
##Rain indie custom actions
We have two custom actions; MoveToWaypoint and MoveToCylinder.
Generating custom actions
For custom actions, generate ActionScript in Javascript (it’s quite similar in C#). Create a custom action, give it a class name in the class field, and then right click the custom action and generate the action script. If you try to save the file and there’s a warning about line endings, just click convert. Ensure that the Class option in the custom action node is referring to the class you’ve created. Each custom action class starts with four functions: newclass, Start, Execute, Stop. You can read more about these functions here. A quick rundown of three interesting ones would be:
- Start: called once when the node is first used
- Execute: does the logic for the action
- Stop: called as a cleanup when executing has finished
| Each of these functions return ActionResult.SUCCESS | RUNNING | FAILURE |
- Success: action completed successfully
- Running: more to be done
- Failure: action failed
MoveToWaypoint
I created a file called AIPatrol to get the AI to patrol between waypoints. See the gist here. In the start method, the wayPath is setup. This gives access to the PathManager and all of its methods. From here, we can ensure the waypoint collection is being used. We are also setting up the wayPathSize (how many waypoints in the waypoint collection) so we can loop through all the waypoints.
The nextWaypoint() function is for looping through the waypoint collection. Will simply go back to the first waypoint when the last waypoint has been reached and then calls getWaypointLocation(). That method will find the transform.position of the next waypoint in the collection. It seems a little messy but the currentPointName is getting the name of the waypoint. The split is needed because the name will be ‘waypoint123 (UnityEngine.Transform)’ and we just want the waypoint123 part. We can then find the waypoint position using the name we found. Looping through the waypoints this way means you can add and drop extra waypoints to this collection without having to rename them all.
The execute method is straightforward. Determine how close the AI is to the goal waypoint, if it’s not close enough: keep moving. Otherwise, switch to the next waypoint. Note that this could have been done with a MoveTo like so:
(gist)
This will move the AI to a point and exit out once they’re there. However, this never quite reached one of the waypoints for some reason, so I went with the ‘how close’ way of moving. Also note that the execute method is returning RUNNING. This is because we want this method to keep going, much like the update method in a regular unity script.
MoveToCylinder
Here I created the AIMoveToCylinder class. This has a similar start method to AIPatrol, except we’re ensuring that the navgrid is used, and we need the cylinder object and the AI’s sensor. The cylinder object is found by getting the variable from the detect action. The detected variable is found by getting the context item using the variable name.
In the execute method, the AI will move towards the cylinder as long as the cylinder has been detected and the ray sensor can currently see it. Otherwise, the AI will move towards the point that the cylinder was last seen using VectorTarget. Also, the canSeeCylinder is set back to 0 as the AI can no longer see the cylinder.
##Outro
So that’s a fairly basic introduction to custom actions. I hope it has given you a nice introduction to what can be accomplished with the custom actions. I may cover some newer stuff to do with Rain in the future.